




제작시간: 8시간
제작비용: 로봇 손 70달러, 제어기판 400달러
난이도: ●●●●●
소프트 로봇공학 세계의 연구자들은 내구성과 유연성은 물론 인간과 더불어 살기에 안전한 로봇의 개발을 지향한다. 작년 9월 하버드대학이 온라인에 공개한 개방형 소프트 로봇공학 툴 키트를 활용하면 DIY 마니아들도 그런 로봇을 만들 수 있다.
하버드대학이 제시한 몇몇 소재와 기술은 비전문가에게는 범접하기 힘든 영역에 있다. 그러나 조금만 고민하면 한층 저렴한 재료와 간단한 기술로 대체가 가능하다. 파퓰러사이언스의 경우 이벤트용 요술풍선과 발로 밟는 공기펌프에서 떼어낸 주름진 호스 등을 사용해 손가락을 제작했다. 그리고 이를 장난감 갑옷의 플라스틱 장갑에 부착, 로봇 손을 완성했다.
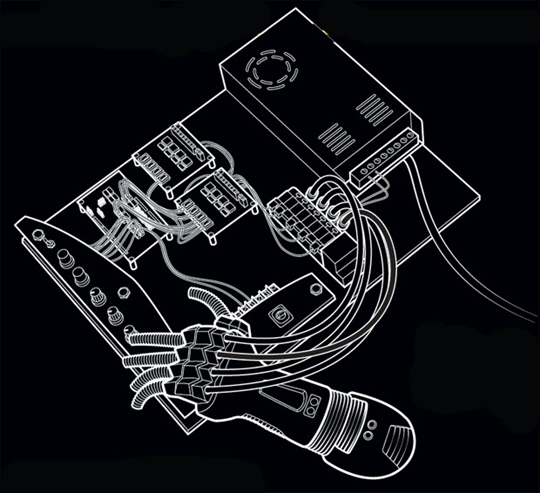
손을 완성했다면 다음 과제는 유압식 제어기판이다. 이 제어기판은 아두이노 컨트롤러가 두뇌 역할을 하는데 공기 밸브를 제어해 손가락으로 승리의 V를 만들 수도, 뭔가를 잡을 수도, 심지어 종이비행기를 접을 수도 있다.
* popsci.com/robothand에서 더 자세한 제작법을 확인할 수 있다.
[준비물]
· 직경 약 1㎝의 주름진 호스
· 직경 0.8㎝의 목재 장부촉
· 외경 0.6㎝의 비닐 튜브
· 소형 호스용 클램프
· 0.6㎝의 호스용 바브(barb) 및 0.6㎝의 수놈 나삿니 어댑터 각 5개
· 0.6㎝의 호스용 바브 및 0.6㎝의 암놈 나삿니 어댑터 각 5개
· 절연 테이프
· 노란색 테프론 끈 테이프
· 이벤트용 요술풍선 여러 개 (TYPE 350Q)
· 2.5㎝×15㎝ 크기의 기판

[INSTRUCTION]
1 호스를 손가락만한 길이로 5개 자른다. 자연스러운 휘어짐에 주의해서 휘어지는 부분의 위쪽을 손가락 위쪽으로 가도록 한다. 그리고 센터 펀치와 드릴 프레스를 활용, 호스 양쪽의 주름 사이에 구멍을 뚫는다. 목재 장부촉을 삽입해 손가락 모양이 유지되도록 한다.
2 각 손가락의 위쪽 주름 사이를 구멍에 닿을 때까지 한쪽에서 반대쪽까지 자른다. 이제 손가락이 더 쉽게 굽혀질 것이다.
3 장부촉을 사용해 각 손가락 안에 풍선을 삽입한다. 손가락 끝으로 삐져나온 풍선 주둥이를 절연 테이프로 봉한 뒤 손가락 끝도 글루건과 절연 테이프로 봉한다.
4 풍선의 열린 끄트머리를 각 손가락 끝에서 2.5㎝가량 남기고 잘라낸다. 풍선의 열린 끝을 손가락 끝으로 늘여서 절연 테이프를 붙인다.
5 각 수놈 호스용 바브의 주름을 테플론 테이프로 감싸고, 암놈 호스용 바브 안으로 단단히 고정시킨다.
6 글루건으로 5개의 손가락을 기판의 끝에 붙인다. 마지막으로 비닐 튜브를 각 손가락의 호스용 바브에 연결한다.
7 이로서 손이 완성됐다. 하지만 제어 시스템도 만들어야 한다. 그 제작법은 popsci.com.robothand에서 확인할 수 있다.
20kgf/㎠ 로봇 손가락이 주먹을 쥐는 데 필요한 압력.
장부촉(dowel) 접합이나 고정을 위해 나무, 플라스틱, 금속을 못 모양으로 만든 부품.
센터 펀치(center punch) 공작물 등에 구멍을 뚫을 지점을 표시하는 공구.
< 저작권자 ⓒ 서울경제, 무단 전재 및 재배포 금지 >






































