인공지능(AI)을 탑재해 손쉽게 속도와 경사도를 조절할 수 있는 보행 보조 기술이 한미 공동연구를 통해 개발됐다. 노약자의 보행을 더 효과적으로 돕는 데 쓰일 것으로 기대된다.
광주과학기술원(GIST)은 김경중 AI융합학과 교수와 김승준 교수 연구팀이 다니엘 루스 미국 매사추세츠공대(MIT) 교수, 보이체흐 마투식 교수, 이유 루오 워싱턴대 교수와의 공동 연구를 통해 AI를 적용한 보행 보조 로봇 ‘적응형 워커’를 개발했다고 12일 밝혔다. 연구성과는 세계적 로봇 학술대회 ‘IEEE ICRA’에서 지난달 20일 발표됐다.
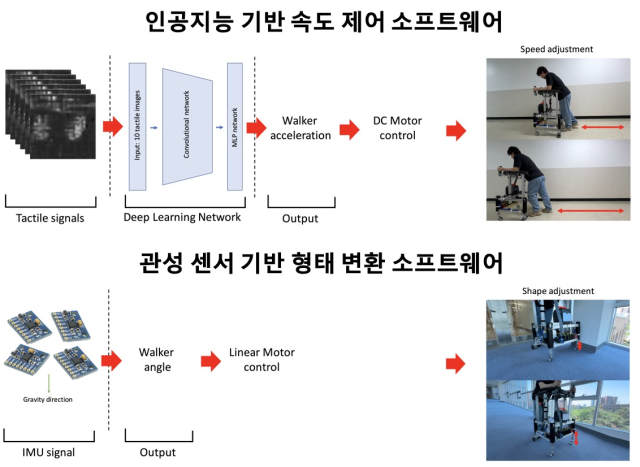
적응형 워커는 촉각센서와 관성센서를 탑재해 손쉽게 속도와 경사를 제어할 수 있다. 기존 보행 보조 기술은 걸음걸이에 맞게 속도를 조절하거나 오르막길이나 내리막길에에서 균형을 유지하기 위해 경사를 조절하려면 TV 리모컨처럼 일일이 버튼으로 작동해야 했다. 고령자는 이 같은 조작이 어렵고 속도와 경사를 자주 조절해야 하는 복잡한 환경에 즉각 대응하기 어렵다는 한계가 있었다.
적응형 워커의 촉각센서가 팔의 움직임을 감지하면 AI가 이를 분석해 사용자가 얼마나 빠르게 걸으려고 하는지 의도를 예측한다. 실험결과 AI는 보행 속도를 20% 이내의 오차로 예측해내는 것으로 나타났다. 별도의 조작없이 자연스러운 움직임만으로도 속도 조절이 가능하다고 연구팀은 설명했다.
관성센서는 지면의 경사를 실시간으로 감지해 보행 로봇의 앞다리나 뒷다리 길이를 자동 조절해준다. 실험을 통해 로봇은 1도 이내의 오차로 수평을 유지할 수 있었다고 연구팀은 전했다.
김 교수는 “보행이 불편한 고령자에게 실질적인 도움을 줄 수 있는 기술적 해법을 제시했다”며 “더 많은 기능을 갖춘 차세대 보행 보조 장치를 개발해 고령자의 이동 편의성을 극대화해 나갈 계획”이라고 말했다.
< 저작권자 ⓒ 서울경제, 무단 전재 및 재배포 금지 >
 sookim@sedaily.com
sookim@sedaily.com