표준과학硏 김종호 박사 "인공피부로 사람처럼 온도등 감지"
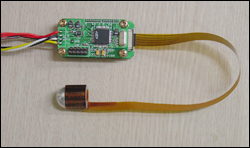 | | 핑거팁 형태로 모듈화된 촉각센서. |
|
계란처럼 둥글고 약한 물체를 손으로 잡거나 온도를 느끼는 로봇이 개발되기 위해서는 사람의 손끝처럼 미세한 감각이 필요하다.
한국표준과학연구원 기반표준부/힘연구실의 김종호박사는 사람을 닮은 로봇개발의 핵심부품인 로봇용 촉각센서를 개발하고 있다. 로봇에게 미세한 감각을 가진 인공피부를 부착하기 위한 연구다.
현재 김박사는 0.1㎜ 두께의 폴리이미드 필름으로 촉각센서를 만드는 1단계 연구를 마치고 손가락 첫마디에 해당하는 핑거팁 형태로 모듈화하는 2단계 연구를 진행중이다.
3월중 로봇 손에 핑거팁을 부착하는 테스트를 진행할 계획으로 이 연구가 완료되면 핑거팁을 로봇 손에 결합시키는 것 만으로 계란과 같은 물건을 잡는 것이 가능하다.
이 핑거팁에는 물건을 어느정도의 힘으로 잡고, 그 순간 미끄러지고 있는지 등을 감지하는 미세한 촉각센서가 부착돼 있다. 김박사가 개발한 촉각센서는 0.05~0.5뉴톤(1뉴톤은 약 100g정도의 무게로 눌리는 힘)의 압력과 0~50℃의 온도를 감지할 수 있다.
또 촉각센서를 이용한 로봇용 발바닥 센서도 개발중으로 이 기술이 개발되면 실리콘처럼 부드러운 소재의 발바닥을 가진 로봇이 전선 같은 물체를 밟고도 쓰러지지 않거나 요철이 있는 바닥을 보행하는 것이 가능해진다.
김 박사는 "로봇 개발의 방향이 사람을 닮아가는 것과 같이 촉각센서의 궁극적인 목표는 촉감센서를 개발하는 것"이라고 밝힌다.
촉각센서는 닿는 힘이나 온도의 물리적인 측면만 감지하지만 촉감센서는 사람처럼 느끼게 된다는 개념이다. 즉 로봇이 미세한 작업을 하기 위해서는 그만큼 많은 촉각센서가 필요하지만, 센서의 갯수가 증가할 수록 로봇의 중앙처리장치가 담당해야 할 데이터 양이 급증하게 된다.
하지만 실제로 로봇에게 필요한 정보는 현재 물건을 쥐는 행동이 안정적인지 아닌지 정도이고, 촉감센서는 현재 물건을 쥐고 있으며 미끄러지지 않고 있다는 정도의 정보만을 로봇에게 전달하고 나머지는 스스로 처리하는 셈이다.
김 박사는 이 촉각센서를 로봇 이외에 휴대폰의 키패드에 적용하는 상용화 연구도 검토중이다. 이 기술이 휴대폰에 적용되면 슬림화 뿐만 아니라 키패드 상의 버튼 위치를 변경하거나 게임에 필요한 버튼만 활성화 시키는 것 등이 가능해진다.
< 저작권자 ⓒ 서울경제, 무단 전재 및 재배포 금지 >