사람의 생각 만으로 로봇 팔을 움직이는 기술이 개발됐다. 사지 마비 환자나 운동 장애를 겪는 환자들을 돕기 위한 의료기기에도 접목할 전망이다.
한국과학기술원(KAIST)은 정재승 뇌인지과학과 교수 연구팀이 인간의 뇌 신호를 해독해 로봇 팔을 제어하는 ‘뇌-기계 인터페이스 시스템’을 개발했다고 24일 밝혔다. 정천기 서울의대 신경외과 교수 연구팀과 공동 연구를 진행했다.
뇌-기계 인터페이스는 팔을 움직이는 데 장애가 있거나 절단된 환자가 로봇 팔 제어를 통해 팔 동작을 회복할 수 있는 보조기술이다. 이를 구현하기 위해서는 인간이 팔을 움직일 때 뇌에서 발생하는 전기신호를 측정하고 기계학습 등 다양한 인공지능 분석기법으로 뇌 신호를 해독해 의도한 움직임을 뇌 신호로부터 예측할 수 있는 디코딩 기술이 필요하다.
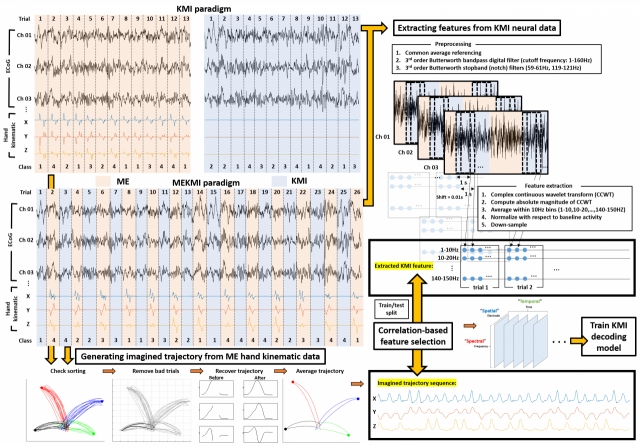
연구팀은 뇌전증 환자를 대상으로 팔을 뻗는 동작을 상상할 때 관측되는 대뇌 피질 신호를 분석해 환자가 의도한 팔 움직임을 예측하는 팔 동작 방향 상상 뇌 신호 디코딩 기술을 개발했다.
이러한 디코딩 기술은 실제 움직임이나 복잡한 운동 상상이 필요하지 않기 때문에 운동 장애를 겪는 환자가 장기간 훈련 없이도 자연스럽고 쉽게 로봇 팔을 제어할 수 있다. 앞으로 다양한 의료기기에 폭넓게 적용할 수 있을 것으로 보인다.
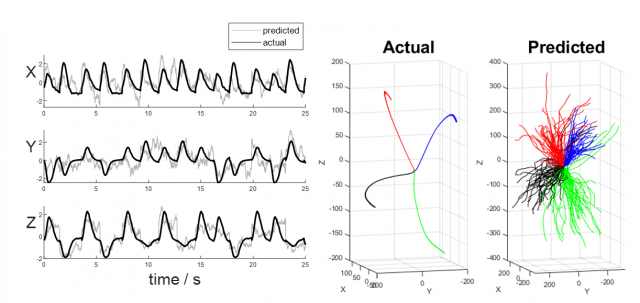
연구팀은 대뇌 피질 신호 디코딩을 통해 환자가 상상한 팔 뻗기 방향을 최대 80% 이상의 정확도로 예측할 수 있음을 확인했다. 이번에 개발한 팔 동작 방향 상상 뇌 신호 분석기술은 향후 사지마비 환자를 비롯한 운동장애를 겪는 환자를 대상으로 로봇 팔을 제어할 수 있는 뇌-기계 인터페이스 정확도 개선 등에 이바지할 수 있을 것으로 기대된다.
연구책임자 정재승 교수는 “장애인마다 서로 다른 뇌 신호를 맞춤형으로 분석해 장기간 훈련을 받지 않더라도 로봇 팔을 제어할 수 있는 기술은 혁신적인 결과”라며 “이번 기술은 향후 의수를 대신할 로봇 팔을 상용화하는 데에도 크게 기여할 것으로 기대된다”고 말했다. 연구 결과는 뇌공학 분야 국제 학술지 ‘저널 오브 뉴럴 엔지니어링’ 9월 19권 5호에 게재됐다.

< 저작권자 ⓒ 서울경제, 무단 전재 및 재배포 금지 >
 dorimi@sedaily.com
dorimi@sedaily.com